
2017 台北國際汽車零配件與車用電子展覽會(英文簡稱: Taipei AMPA)於 4 月 19 日展開,一如去年雙管齊開的模式,一樣在世貿一館與南港展覽館進行。其中 U-CAR 在 4 月 11 日參加台灣車輛研發聯盟(TARC)的展前記者會,當時提到將會在本屆 AMPA 展中,提供我國開發的自駕車技術之體驗。
因此筆者也前往位於捷運南港展覽館 1 號出口外的空地現場,除了認識 TARC 運用在自動駕駛的技術之外,同時也感受一下結合多項先進技術的自動駕駛遊園車 e-golf 的表現。

TARC 主題館,展示 21 項展品
位於南港展覽館 4 樓的 TARC 主題館,展出車輛研究測試中心(ARTC) 、金屬工業研究發展中心、工業技術研究院機械與機電系統研究所、材料與化工研究所、國家中山科學研究院等法人研究機構與業者合作共計 21 項最新的研發成果。
在「智慧安全(Intelligent)」面向,包括感測技術(融合技術)、控制決策、系統功能等三大類別的 10 項展品,而在「電動潔能(Electrified)」領域則是含括動力系統、充電系統、儲能系統、轉向系統及車體輕量化等 11 項展品。
車輛協同式定位系統,取代昂貴的 RTK GPS 定位
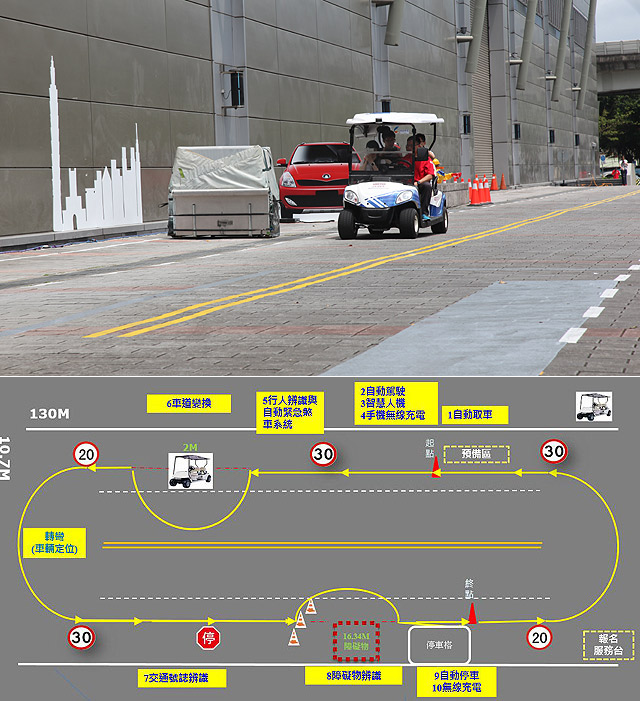
至於本次首度在展覽期間提供自動駕駛體驗,當中則是運用了包含像「影像式前方障礙物辨識系統」、「車輛協同式定位系統」、「車道變換系統」、「號誌辨識系統」、「3D 光達障礙物偵測系統」、「自動停車系統」、「電動車無線充電」、「車道跟隨系統」等等,藉由 10 道關卡進行體驗。
首先看到前四項:
1. 影像式前方障礙物辨識系統:以攝影機為基礎的影像辨識,加上系統的學習功能,在車輛上實現即時運算偵測,還能辨識行人、機車或腳踏車等障礙物;目前可偵測的車速在時速 120 公里內,偵測距離方面,汽車為 5-90 公尺、機車腳踏車或行人的偵測距離在 5-30 公尺。
2. 車輛協同式定位系統:對於車輛自動駕駛而言,定位系統一定是一大關鍵。而在過往大多數車廠用的是 RTK Sensor(RTK 即為 Real-time kinematic,即時動態定位),藉由地面站蒐集 GPS 傳遞訊號碰上大氣層裡面游離層形成的誤差,加上多角的定位,讓抓測車輛位置更精準。而協同式定位系統則是主要透過圖資輸入電腦,加上慣性量測元件、輪速計、攝影機、光達等等的應用,讓 GPS 抓取車輛定位能夠藉由判讀與圖資裡的各種固定標的物(舉例如:紅綠燈、電線杆)之距離差,找到車輛的正確位置。
3. 車道變換系統:藉由變換軌跡規劃、主動轉向控制、軌跡追蹤控制、行駛軌跡預估等技術,結合在一起達成車道變換。
4. 號誌辨識系統:利用最大穩定區域(MSER)以及支持向量機(SVM)等影像處裡技術,能夠做到即時偵測辨識交通號誌的功能。

要特別說明的是協同式定位系統部分,TARC 表示這套系統透過自駕車本有的光達、攝影機等設備,加上藉由輸入圖資的方式,就可讓 GPS 定位車輛的精準度,只比 RTK GPS 多十幾公分的誤差,成本卻更低;然而其主要的限制在於圖資的輸入量之多寡,像遊園車、高爾夫球車等等,行駛之區域與路線的圖資量較小,便可選擇以協同式定位系統達到自動駕駛的定位。
不過如果是一般在路上四處奔波的車輛,其圖資的輸入量將會相當龐大,因此 RTK GPS 仍是最好的選擇,但 TARC 藉由本次的自動駕駛展示,想傳達的是定位系統方式其實很多,廠商是可以因應不同的用途、環境,使用不同的定位系統,讓自動駕駛更能降低開發成本。

接著看到後四項:
5. 3D 光達障礙物偵測系統:藉由國外購入的光達(LiDAR),使用立體環景掃描光達探測周遭物體表面,經過過濾、轉換等分析演算法,讓電腦判斷障礙物之相對位置及大小,且由於光達主要是透過打出去波長較短的雷射光反射回來得到其距離等資訊,所以目前大多無法在下雨天等狀況進行(由於雨滴像是凸透鏡,會影響光的反射與折射)。
6. 自動停車系統:透過超音波感測器來搜尋停車空間再進行停車軌跡規劃,並透過車輛移動軌跡控制技術,系統介入方向盤控制將車輛自動駛入停車空間。
7. 電動車無線充電:採用磁共振無線充電技術,包含:線圈構型、電力轉換模組、整流電路、功率調控、無線通訊協定等核心技術,具備高功率與高效率之特性。
8.車道跟隨系統:藉由車道模型偵測、主動轉向控制、軌跡追蹤控制、行駛軌跡預估等技術,形成之影像模組偵測前方車道資訊,並回傳至車道跟隨控制器,車道跟隨控制器同時會估算車輛未來可能行駛之路徑,如車道軌跡與車輛未來行駛路徑存在誤差,控制器會控制電動輔助轉向系統進行車輛行駛軌跡修正,使車輛維持在目標車道內。
自動駕駛搭配電動車,尚有相關配套措施須注意
到了自動駕駛體驗區,在筆者排定上車體驗時,前面已經有過 6 組的體驗,原先看似將安穩的繞完一整圈的流程,不過好巧不巧,就在從預備區開始,到了 U 型轉彎處(可參考上圖最左邊),卻沒有完整的彎過去,便卡到了牆壁;接著當前往第 8 關「障礙物辨識與閃避」,雖然順利辨識了障礙物,也切換了車道,不過車道維持似乎出了一些問題,越過了雙黃線,最後到「自動停車」的體驗也沒能順利進行。

在這一趟體驗中,便出現 3 個地方 NG,不免讓人對於國內開發的自動駕駛技術信心度大打折扣,不過工作人員便立即解釋到,不管是車輛定位、車道穩定、自動駕駛停車系統等等,都是沒有問題的。
由於 TARC 將上述這些系統另外接到電量較小的副電池,而非原先這輛遊園車本身就安裝的主電池,為的是減少系統相容與設定的作業時間(因為該輛 e-golf 要設置自動駕駛,僅有 3 個月的準備時間),加上從第一梯次開始便沒有間斷、都是整車滿載開放體驗,這也使得電池耗電量相當大,即便最後一關有無線充電技術,但也只能稍微示範,並未能完整停放進行充電,工作人員表示,若要能完整以無線充電方式充電,功率全開之下大約需 2 個小時。


所以在電池電量不足的情況下,以 U 字轉彎處來說,其實是有些坡度的,才沒能順利彎過去而卡住,因此工作人員也趕緊進行電池的更換,系統便能順利正常運作。
不過如果未來電動車搭配自動駕駛,究竟會不會發生因電量不夠而自動駕駛出現問題的狀況?TARC 則回應,由於這不是技術上的問題,而是相關技術對應電池的配套措施未準備好,但如果是實際要在路上行駛的車輛,原則上大多會設定一旦電量不足就有相關功能必須停止運作,因此像自動駕駛這種功能勢必就會被設定提前關閉,避免發生失靈的情形。







討論區
成為第一個發表的人