
受到疫情影響,2020 Taipei AMPA 展的規模縮小,同時 mTARC「台灣車輛移動研發聯盟」也因此缺席了此次的展覽,不過科技部的自駕車次系統關鍵技術研發專案計畫,當中 5 所大學包含台北科技大學、逢甲大學、交通大學、中興大學與成功大學,仍分別帶來自家與自駕車相關技術的研發成果,各司其職當中,從路況感知、聲音輔助感知、路面感知、智慧車燈、危急情況預判乃至最後的決策,建構出更完善的自駕控制技術。

交通大學:自駕車感知與 AI 演算法解決方案
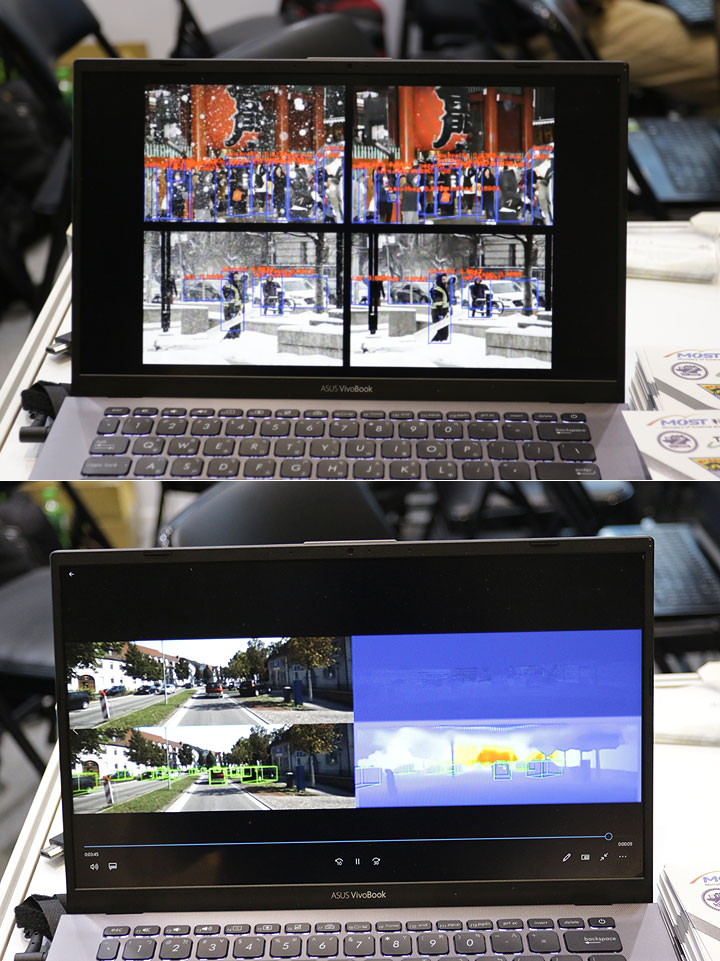
眾所皆知的,自駕車對於環境的感知與偵測,目前就是依靠攝影機、光達與雷達,不過大家仍然對於自駕車能否在所有環境下,準確判讀障礙物會有所疑慮。在交通大學的研發成果,首先針對攝影機與光達推出優化的解決方案。
在攝影機的部分,大多數在低能見度的環境,包括下雨、下雪或者起霧,就會因為模糊而無法判讀影像,不過交通大學的去霧化解決方案,能更加提升嚴苛環境下的攝影機影響判讀,再搭配光達的深度填補與 3D 偵測,運算速度較目前大部分自駕系統提升超過 300%,同時能更正確的閱讀形體,讓自駕車能在各種環境下正常行駛。
有了這些基本功,也讓交大的路徑預測技術獲得世界認可,超越史丹佛大學的演算法,其平均位移預測的的距離更勝史丹佛大學,也代表車輛得以正確閱讀路上的形體移動。
最後是全球首例交通場域音訊分析技術,也就是讓車輛形同有耳朵一般,即便像是警消車輛被障礙物遮蔽,但透過鳴笛時,車輛能預先察覺,而避免發生意外;或是後方車輛的按鳴喇吧提醒前進,也能猶如提醒駕駛人一般,提醒車輛向前。

成功大學:感知預判危險狀況的反應
在成功大學的研發,也是屬於感知端的部分,不過其著重的點在於危險狀況的預判與反應,也就是如果前方車輛看似即將要失控、發生車禍的狀態,能讓自駕車了解前方車輛的不正常行駛,進而提早煞車或迴避。
確實在目前許多自駕系統,都會想辦法建構更完整的資料庫,讓自駕車能夠理解所有路況,但若有即將失控的車輛,其行徑是較不容易蒐集並建置自駕車的資料庫,因此透過感知系統的危險預判,也攸關於自駕車能否真正達到 100%的安全。

逢甲大學:學習道路缺陷辨識系統
逢甲大學的部分,重點則在於深度學習智慧感知與自主決策技術於果懺畫主動懸吊系統的研製。這裡頭包含「學習即時物件偵測系統與晶片設計、自適應學習之類主動懸吊系統、基於邊緣運算與學習道路坑洞辨識系統、學習道路缺陷辨識系統」等等。
雖然主動懸吊系統這一詞大家都聽過,不過若是用於自駕車上,當面對道路坑洞、塌陷時,究竟能否迴避、或者判斷可通過,同時調整懸吊系統,提供車內更舒適的乘坐體驗,因此在懸吊的氣壓彈簧、液壓阻尼的同步控制、車規嵌入式電控系統、道路訓練模型的建立,乃至臺灣道路缺陷的樣本資料庫與即時 AI 道路辨識技術,這些也都是自駕車不可忽略的研發事項。

中興大學:智慧頭燈嵌入式光達模組
在中興大學的研發成果,主要是以嵌入式光達模組應用在頭燈,來打造更加智慧的雷射頭燈。而此研發重點,在於讓頭燈能更正確的判讀路況、對向來車等等,進而準確的調整頭燈照明的場形。
由於現在大部分的頭燈,多是攝影機閱讀路況之後,進行頭燈自動啟閉或遠光燈切換等等,不過透過光達嵌入,讓頭燈的照明調整更準確也有效率。而這樣的應用其實還可再發展到未來自駕系統所需閱讀路面的光達,有機會進一步縮小藏在車輛內,讓感知器的安裝不必改變車輛外觀。

台北科技大學:自駕系統感知與決策控制次系統研發
最後在台北科技大學,重點就在於自駕系統感知與決策控制次系統研發,特別是其決策控制,能更正確的控制車輛行駛,北科大的測試數據表示目前許多決策的正確率也達 98%、99%。另外包含 GPS 定位車輛的誤差在正負 3~5 公分。
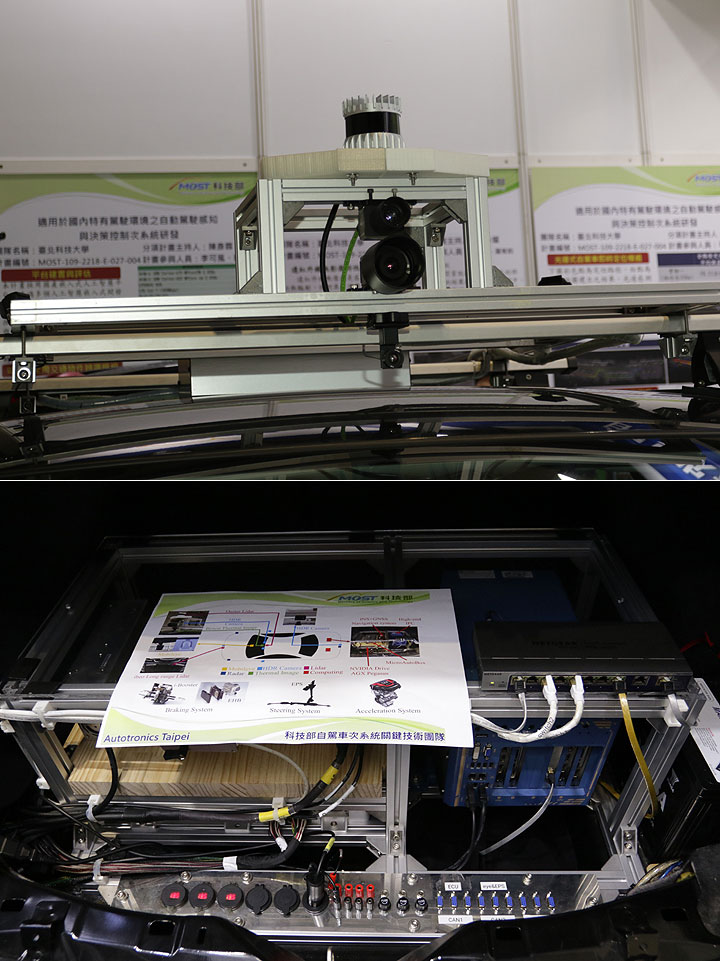
北科大表示,也透過 Luxgen 贊助的車輛,讓他們能夠先去改裝引擎、煞車與轉向系統,改裝的用意在於可以導入各種電控系統,讓自駕車平順的控制,接著就是光達、攝影機與雷達的使用。其中在攝影機部分,還加入了熱影像的辨識,也能幫助提升路況、障礙物的閱讀。

而熱影像辨識攝影機為了方便拆裝,是設置在車頂。所有的決策控制系統,則安置在後車廂,雖然看似體積龐大,不過北科大表示,這個用意也是方便拆裝與散熱需求,實際上若未來有量產的機會,負責決策控制硬體設備並不需要這麼大。





討論區
成為第一個發表的人